

5年前、リチャード・ガイラーとトム・ヴァネックはオフィスから数ブロック離れたバーに座り、仕事のことを考えずにいようとしていた。二人のエンジニアは1年近くもの間、障害物を回避し、建物内を移動し、嵐の中でも飛行できる耐久性の高いドローンの開発に取り組んでいた。固定翼機も試してみたが、障害物を効果的に検知できるほどのセンサーを追加すると、重すぎて飛行できなくなってしまった。ヘリコプターも試してみたが、ローターが枝や電線に絡まってしまい、うまく飛ばなかった。モーター付き気球まで作ったが、微風が吹くだけでコースを外れてしまう。
ビールを飲みながら、ギーラーとヴァネックはハエが窓に激突する様子を見つめていた。ドローンのように衝突でバラバラになるのではなく、ハエはガラスに跳ね返って回復した。そしてまた同じことを繰り返した。
「まさに天啓でした」と、マサチューセッツ州の研究開発会社フィジカル・サイエンシズ社(PSI)で働くヴァネック氏は語る。「もし物体に衝突し、回復し、そして飛行を続けることができる人工のシステムを作ることができれば、それは革命になる、と気づいたのです。」
自然からデザインを借用するという発想は、特に飛行に関しては決して新しいものではありません。古代ギリシャ人はダイダロスを夢想し、息子に翼を与えました(残念ながら、これは少々うまく行き過ぎてしまいました)。レオナルド・ダ・ヴィンチは人力で飛ぶ羽ばたき機のスケッチを描きました。しかし最近まで、発明家たちはハエやハチといったありふれた生き物を図面から機械化するための空気力学の専門知識を欠いていました。技術の進歩に伴い、科学者たちは自然の多くの秘密を解明してきました。そしてエンジニアたちは昆虫に着想を得た初の飛行体を開発し、全く新しい種類の機械、マイクロドローンへの扉を開きました。
「素晴らしいデザインに関しては、自然は私たちより数億年も先を進んでいます」と、ワシントンD.C.に拠点を置くブルッキングス研究所の研究員、ピーター・シンガー氏は言う。「明日のロボットは、今日とは全く違う姿になるでしょう。むしろ、身の回りの動物に似た姿をしている可能性が高いでしょう。」
飛行の謎を解き明かす
昆虫とその近縁種は、世界の動物種の約80%を占め、その数は約90万種に上りますが、その飛行メカニズムは長らく謎に包まれていました。従来の固定翼航空機は、翼上の安定した空気の流れに依存しています。ヘリコプターやローターも同様です。しかし、昆虫の羽が前後に羽ばたくと、周囲の空気は常に変化します。そして、ミツバチなどの昆虫の短い羽は、従来の定常空気力学の原理では説明できないほどの重量を持ち上げます。
エンジニアたちは昆虫からヒントを得た初の乗り物を開発し、まったく新しい種類の機械、マイクロドローンへの扉を開いた。
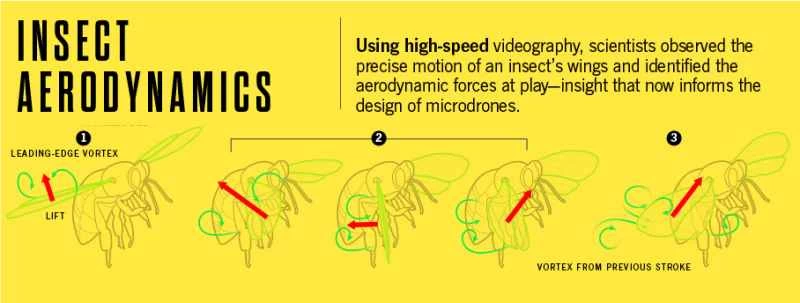
科学者が羽ばたき飛行を理解するには、まずそれを極めて詳細に観察する必要がありました。1970年代、ケンブリッジ大学のデンマークの動物学者トルケル・ワイス=フォッホは、高速度写真を使用して、ホバリングする昆虫の羽の動きを正確に分析し、それを昆虫の形態学的特徴と比較しました。このことから、彼は昆虫の飛行の一般理論を定式化しましたが、その中には彼が「clap-and-fling effect」と呼んだものが含まれていました。昆虫の羽が上下のストロークの間で一緒に打ち合ってから剥がれると、その動きによって空気が投げ出され、低圧のポケットが形成されます。次に、空気がそのポケットに勢いよく戻り、渦巻きを形成します。この渦が、羽ばたきの間で昆虫を持ち上げるのに必要な力を生み出します。ワイス=フォッホは、同様の渦が羽の角度と回転によって生成され、さらなる揚力を生み出すのではないかと仮説しました。
20年後、計算技術が理論に追いつき、科学者たちはこれらの原理を人工システムに適用し始めました。ケンブリッジ大学の動物学者で、ワイス・フォグ研究所の元学生であるチャールズ・エリントンは、スズメガの動きを正確に模倣できるロボットの羽を製作しました。彼はそれを煙で満たされた風洞に設置し、羽ばたく際の流体力学を分析しました。カリフォルニア大学バークレー校では、神経生物学者のマイケル・ディキンソンが、同様にハエの自然な動きを模倣するショウジョウバエのロボットの羽を製作し、2トンの鉱油タンクに沈めました。研究者たちはそれぞれ独立して作業を行い、
飛行の空気力学を前例のないほど詳細に特徴づけました。
ディキンソン氏と電気技師のロン・フィアリング氏は、1998年にこれらの原理をハエサイズのロボットに適用するため、DARPAから250万ドルの助成金を獲得しました。彼らは、ロブ・ウッド氏をはじめとする大学院生に、小さな部品を製造し、ピンセットで丹念に組み立てる技術の開発を手伝わせました。ディキンソン氏とフィアリング氏は、学生たちが再現すべき空気力学的な知見についても伝えました。「ハエの翼の軌道は非常に複雑です。そこには、実に様々な微妙な変化が起こります」とウッド氏は言います。「マイケルは、渦やその他の空気力学的効果を生み出す上で最も重要な特徴を教えてくれました。」
ウッドは2004年に卒業し、ハーバード大学に自身の研究室を開設するまでに、極めてエネルギー効率の高い特殊な材料を用いてハエの羽の動きを再現する方法の先駆者となり、昆虫が体の回転を感知するために用いるセンサーを模倣したジャイロスコープを開発し、複雑なシステムを小型で製造する方法を発明していた。残されたのは、これらすべてを組み立てて、昆虫サイズの飛行機械を実際に動作させることだった。
洞察をロボットに変える
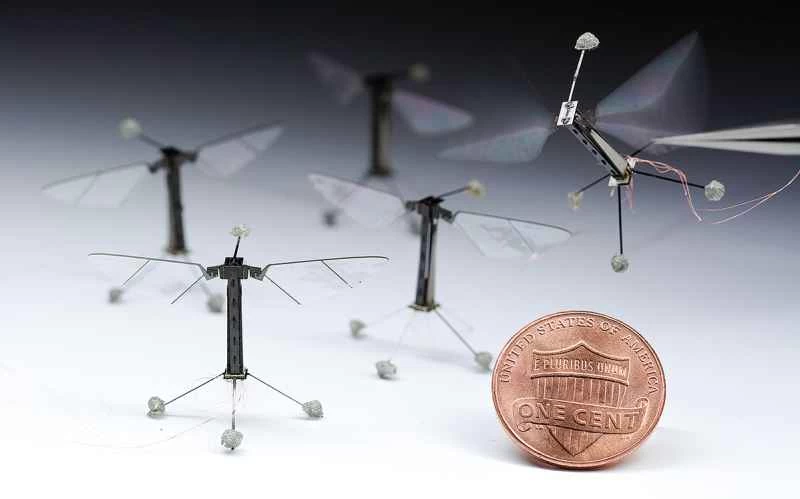
2006年の凍えるような寒さの中、ウッドはハーバード大学オックスフォード・ストリートにある自身の研究室を訪れた。作業台の上には、翼幅3センチ、胸郭はハエほどの大きさで、重さ60ミリグラムのロボットが置かれていた。ロボットは高さ6フィート(約1.8メートル)のコンピューターラックに固定されており、ラックには高電圧増幅器とデータ収集装置がぎっしり詰め込まれていた。ウッドは接続と信号を注意深く確認した。
そして電源を入れると、小さなロボットの翼が振動し始め、数秒間空中に浮かび上がった。ウッドは歓喜に飛び上がった。ここまでたどり着くまでに7年かかり、次の画期的な成果、つまり事前にプログラムされた経路に沿った持続飛行にはさらに5年かかることになる。2012年夏の午前3時、その偉業を証明するメールが彼の受信箱に届いた。興奮した大学院生が、現在RoboBeeと名付けられている研究室の最新プロトタイプの最新情報となるビデオを送ってきたのだ。そのビデオには、繊細なロボットが空中に舞い上がり、昆虫サイズの乗り物で初めて安定したホバリングと制御された飛行を披露する様子が映っていた。
「結局、その晩は眠れませんでした」とウッドは言う。「翌朝、シャンパンを飲んだりしましたが、むしろホッとしました。もしこれができなかったら、ずっと間違ったことをしていたと気付いていたでしょうから。」
ウッド氏はマイクロスケールのロボット飛行の先駆者であり、他の研究者たちは羽ばたき翼の力学を利用して、ペイロードを運ぶことができる航空機の小型化に取り組んできました。2011年には、カリフォルニアに拠点を置くエアロバイロンメント社が「ナノ・ハミングバード」のデモ飛行を行いました。この機体は翼幅16.5センチメートルで、垂直飛行と水平飛行が可能で、突風にも負けずにホバリングできます。重量はわずか19グラムと、一部の単三電池よりも軽量ですが、カメラ、通信システム、そして電源を搭載しています。
ジョージア工科大学での研究から派生した企業、テックジェクト社は最近、翼幅が6インチのロボットトンボを発表した。重さは5.5グラム(25セント硬貨より軽い)で、高解像度の動画や無線通信を可能にするモジュール式の電子パッケージを装備することができる。テックジェクトのトンボは共鳴と呼ばれる空気力学の原理を利用している。翼が最も効率的な周波数で羽ばたくと(空気の密度、翼の速度、生物の重量が完全にバランスしているときに起こる)、渦の波ができて、それが融合して大きくなる。テックジェクトの社長、ジャヤント・ラッティ氏によると、その結果として聞こえるのはハチドリの羽音やミツバチの羽音だ。共鳴を利用した羽ばたきドローンはエネルギー効率を大幅に改善し、最小限の労力で最適な揚力を生み出す。
ラッティ氏と彼のチームは昨年、この製品を愛好家やアーリーアダプター向けに商用化し、2014年末までに他の市場向けに次期バージョンをリリースする予定です。「驚くほどの反響をいただいています」とラッティ氏は言います。「まだ成熟した技術ではありませんが、着実に成長しています。現在もフィードバックをいただき、改良を続けています。」

より頑丈なドローンを作る
小型で壊れやすいドローンでは、予期せぬ衝突による損傷の問題は解決できないため、ギラー氏とヴァネック氏は耐久性に焦点を当てました。バーでハエを観察した後、2人のエンジニアは昆虫の飛行を模倣した経験を持つ人物を探しました。彼らは、後にハーバード大学のワイス生物学模倣工学研究所に加わったウッド氏とチームを組み、空軍の助成金を申請しました。その後、ウッド氏のグループは画像キャプチャシステムを用いて、ガラスとの衝突前、衝突中、衝突後のハエの行動を記録し、分析しました。ハエの体の各部の位置を詳細に観察することで、羽や脚の正確なひねりや回転を測定できました。
ギラーとヴァネックがフィルムの速度を落としたとき、彼らは目の前に現れた光景に驚嘆した。「ハエは少し回転して高度を大きく失うだろうと思ったんです」とヴァネックは言う。「でも、ハエの回復は見事でした。あまりにも速く、息を呑むほどでした。」
ギラーとヴァネックは、ハエの体の特異な形状に注目した。外骨格にはアコーディオンのような部品があり、ショックアブソーバーとして機能していた。また、ハエは衝突の兆候を察知しているようだった。衝突の直前、ハエは脚が最初にガラスに接触するような角度で飛行した。その瞬間、羽は静止した。ハエが窓に激突するたびに、反射的に衝突の勢いに身を任せて落下する。しかし、数ミリ秒以内に、ハエの重心がハエを安定した姿勢に引き戻したようだ。そして再び羽ばたき、制御されたホバリング状態へと移行した。「2、3回の羽ばたきで衝突から回復できるのは驚異的です」とヴァネックは言う。「人工システムでこれほどのことは不可能です。」

二人のエンジニアは、これらの洞察を基に、強靭な飛行機械の開発に着手しました。機体は耐衝撃性を備え、翼は独立して制御される必要がありました。そこで彼らは、ショックアブソーバー(炭素繊維とプラスチック製のセクションの間にゴム製のダンパーを挟み込んだもの)を組み込んだクアッドローターのシェルを設計しました。四枚の羽根を持つ昆虫の優れた制御を可能にする、翼の速度変化を模倣するため、4つのローターそれぞれに専用のモーターを搭載しました。機体が風で位置を外れたり、障害物に接触したりすると、コンピューターが現在の位置とプログラムされた飛行経路のずれを検知し、自動操縦装置が反射的に作動して安定性を回復します。
昨年2月、エンジニアたちは「InstantEye」と呼ばれるドローンを、ジョージア州コロンバス近郊のフォート・ベニング基地に送り込み、毎年恒例の陸軍遠征戦士実験に参加させた。そこでは歩兵小隊がドローンを使用し、一連の任務の遂行を支援した。兵士たちはこのドローンに最高評価の一つである「グリーン」の評価を与えた。

将来のハードルを乗り越える
第一世代のマイクロドローンが市場に登場した現在も、依然として大きな技術的課題が残されている。ウッド氏にとって大きなハードルは電力だ。InstantEye、Nano Hummingbird、Dragonflyといったはるかに大型のドローンとは異なり、RoboBeeは外部電源に接続する必要がある。ウッド氏は微細加工技術を用いて搭載バッテリーの小型化に取り組んでおり、ハーバード大学、ワシントン大学、マサチューセッツ工科大学の研究者と協力し、新型バッテリー、マイクロ燃料電池、ワイヤレス電力伝送の開発を進めている。彼は、最初の自律電源の実証まであと1、2年と見積もっている。
ギラー氏とヴァネック氏は、クアッドローターのプロペラを羽ばたき翼に置き換えることを目指している。InstantEyeは他のドローンに比べて突風や軽微な衝突からの回復力がはるかに優れているものの、それでもプロペラが枝や電線に絡まってしまうことがある。「早く実用化したいと考えていました」とギラー氏は語る。「しかし、羽ばたき翼を持つ鳥や昆虫は、木や枝が動くといった動的な障害物がある環境に最適であることを発見しました。もし絡まっても、その動きそのもので抜け出すのです。彼らはまるで道を切り開いていくかのように。羽ばたき翼こそが唯一有効な手段だと気づいたのです。」
RoboBees は災害現場で生存者を捜索したり、交通を監視したり、作物の受粉を行ったりすることができます。
そして、ロボットハエを作るプロジェクトを立ち上げたディキンソン氏がいる。現在、彼はワシントン大学で研究室を運営し、昆虫の飛行を研究するために高度な画像システムを使用している。初期の高速度カメラは1秒間に約3,000フレームを撮影できた。「15年前、ハエはぼんやりとした小さなUFOのように見えました」と彼は言う。現在、生物学者は、研究者がかつて利用できたものよりはるかに高速で、赤外光で動作する1秒間に7,500フレームで動作できるカメラを使用している。(更新:この文章は明確化のために書き直されました。他のカメラははるかに高いfpsを実現できます。 )ディキンソン氏は飛行の分析にとどまらず、電極を使用して昆虫の脳内のニューロンの活動を記録している。彼は昆虫を飛行シミュレーションシステムに接続し、昆虫に反応を引き起こす視覚刺激(例えば捕食者の写真)を提示する。 「脳内のニューロンが飛行中にどのように情報処理し、感覚情報がどのように行動に変換されるのかを学び始めることができます」とディキンソン氏は言います。「ロブ(ウッド氏)の研究を可能にしたのは、動物が空中に留まるための基本的なメカニズムでした。今、私たちはそれを超えて、ハエがどのように方向転換し、機動するのかを解明しようとしています。」
自然がいかにして優れたセンサーを作り出すのかを学ぶことで、より軽量でスマートなドローンの開発につながる可能性があります。そして、それが実現すれば、ドローンの用途はますます広がるでしょう。ギラー氏とヴァネック氏は、InstantEyeを軍や法執行機関に販売する計画です。英国軍は最近、アフガニスタンの反乱軍偵察に、ブラックホーネットと呼ばれる手持ち式マイクロドローンを導入しました。マイクロドローンは、より身近な用途にも活用できる可能性があります。警察やSWAT部隊が、突風が吹きやすいオフィスビルや銀行の内部、高層ビルの間などから映像を収集できるようになるかもしれません。
ウッド氏は、ロボビーのさらに多様な用途を思い描いている。約1,000匹のロボビーを箱に詰めたとしても、重さはわずか1ポンド(約450グラム)だとウッド氏は指摘する。災害現場に容易に輸送し、生存者の捜索に投入できる。また、交通や環境を監視したり、作物の受粉を助けたりすることもできる。研究者は現場でデータを収集するためにロボビーを活用できるだろう。
用途が何であれ、マイクロドローンはもはやエンジニアにとってダ・ヴィンチのような夢ではありません。機敏で、強靭で、自力で飛び立っています。
アダム・ピオーレがポピュラーサイエンス誌に寄稿したサヴァントに関する最後の特集記事は、2013 年 3 月号に掲載されました。
この記事はもともと『Popular Science』2014年1月号に掲載されました。
