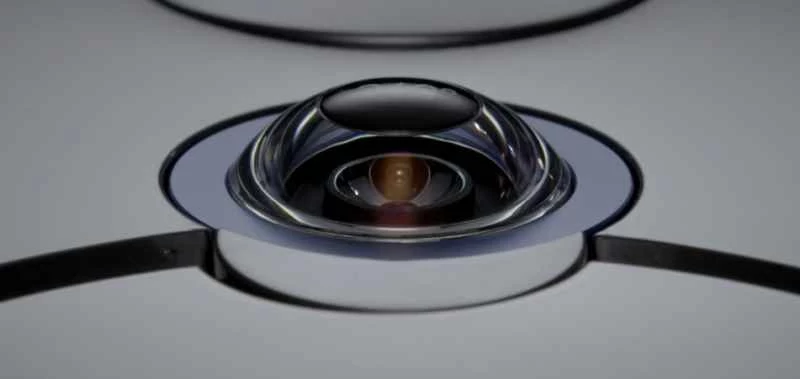
ついに、ルンバにも恐れるべき理由が出てきた。先週、高級掃除機メーカーのダイソンは、パノラマコンピュータービジョンを使って家中を移動するロボット掃除機「360 Eye」を発表した。他の掃除ロボットもカメラを搭載しているが、これほどのものはなかった。その名が示す通り、Eyeは360度を視界に捉え、移動しながら常に周囲を監視し、視覚データを使って地図を作成する。従来の家庭用ロボットがカメラを天井に向けていたのに対し、ダイソンのロボットは目の前の床、邪魔になる家具、壁に掛けられた額入りの写真までも捉える。視野は上方45度まで広がり、より多くの空間的ランドマークを捉えることができる。ダイソンの設計エンジニア、ニック・シュナイダー氏は次のように述べている。「私たちが視覚技術を開発した理由の一つは、人間が主に視覚的に世界と関わっているからです。ですから、同じ手がかりを使って世界と関わることができるシステムを構築できれば、大きな優位性が得られると感じました。」
そこから示唆されるのは、コンピュータービジョンが人間の知覚を模倣し、人類が苦労して獲得した高度に進化した生体力学的効率の一部を借用しているということです。これはロボット研究の目標を単純化する良い方法ですが、あまり正確ではありません。
360 Eye は、人間のように世界を認識するわけではありません。人間は視覚に大きく依存しているとはいえ、そのハードウェアとソフトウェアはこのロボット、あるいはこれまでのどのロボットともまったく異なります。360 Eye 独自のパノラマ レンズが光を集めて単一の CCD イメージング センサーに投影し、ロボットを取り囲むすべてのものの相対的な距離を測定しますが、人間の視覚は方向性のある立体的なセンサーと、生の感覚入力を処理する能力にかかっています。人間の目は通常、前を向いて 2 つあるため、頭全体に眼球が並んでいることで生じる認知負荷を負うことなく、奥行き知覚の恩恵を受けることができます。これは、強大な人間の頭脳でも合理的に処理するにはデータ量が多すぎます。そのため、ダイソンのロボットが完全に途切れのない円を見るということは、その知覚が本質的に人間離れしているということです。
これにより、360 Eye はロボット工学の優れた成果となり、コンピュータ ビジョンの難題に対する最も革新的な戦略の 1 つとなります。ロボット工学者が非構造化環境と呼ぶ環境 (物体が突然人の進路に迷い込む可能性があり、機械で読み取り可能なバーコード、赤外線反射器、その他のパンくずの痕跡がない環境) で動作するように設計されたほとんどの自動システムは、視覚を補助的な感覚として使用し、代わりにレーザー、超音波、レーダー、またはこれら 3 つの組み合わせに頼っています。その理由の 1 つはコストです。カメラ 1 台は必ずしも高価ではありませんが、広い範囲を見るためにレンズやセンサーを搭載すると、コストがかかりすぎる可能性があります。コンピュータ ビジョンに関するもう 1 つの、より技術的に興味深い障害は処理です。機械は収集したすべての光子をどうするのでしょうか。
これは、ほとんどの人間が頭蓋骨にある灰白質のおかげでうまく対処できる問題です。人間は視覚的なノイズから特定の物体を難なく選び出し、瞬時にそれらを分類し、意味と結果のマトリックスを常に更新することができます。例えば、人間は歩いているときに互いにぶつかる傾向がないので、廊下で近づいてくる人はおそらく道を譲るでしょう。そして、あなたは目とは何か、顔とは何かを理解しているからこそ、このことを理解できるのです。そして、その人の目と顔があなたに向けられていること、そして、彼の態度に悪意や狂気の冷徹な輝きがないことを。それは、壁にホッケーチェックをしかけている兆候かもしれません。
ロボットはそんなことを全く知らない。この認識力の欠如は、ロボットそのものの問題というよりも、人工知能の問題であり、研究者たちの懸命な努力にもかかわらず、コンピュータービジョンの有用性を人間の視覚よりもはるかに劣るものにしている。
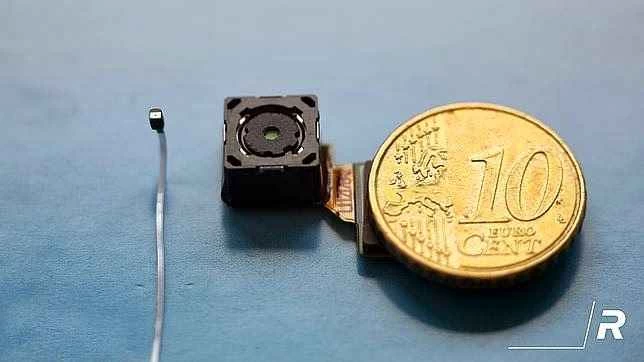
ちなみに、これらの取り組みを否定するつもりはありません。注目に値するものもあります。カリフォルニアに拠点を置く半導体メーカー、ラムバス社は現在、レンズを持たず、直径200ミクロン(人間の髪の毛の直径の約2倍)の視覚センサーを開発しています。光学ガラスを使わず、プラスチックフィルム程度の薄さのこれらの視覚ドットは、極めて耐久性が高く(数百ジーの機械力にも耐える)、非常に安価(1個あたり約10セント)、消費電力も少なく、小型のソーラーパネルなどの局所的なエネルギー源から得られる電力を消費します。つまり、あらゆる場所に貼り付けることができます。ロボットの腕に取り付けて手足の位置をより正確に把握したり、ヒューマノイドの後頭部に埋め込んで全体的な認識力を高めたり、従来型のカメラの周りに配置したりすることができます。各ドットが捉える画像の解像度は極めて低いものの、パターン認識能力に優れています。ラムバス社の主任研究科学者パトリック・ギル氏が指摘するように、これらのロボットは多くのクモが持つ小さな目のような機能を果たす可能性がある。「ロボットが何らかの動きの変化を察知し、高解像度のカメラをその方向に向けることができるのです」とギル氏は言う。
ラムバスは来年、開発者やメーカーコミュニティのメンバーにプロトタイプを配布する計画だが、これらのレンズレスセンサーは、低コストのコンピュータービジョンとしてはまだ実証されていない戦略だ。その対極にいるのが、2003年にシーグリッドシステムズを共同設立したロボット工学の先駆者であるハンス・モラベックだ。シーグリッドの将来は比較的不透明で、現在は財政難に陥っているが、その中核技術は常に素晴らしいものだった。ピッツバーグに拠点を置くこの企業は、モラベックの3Dビジョンに関する研究を基に、産業環境向けの自律フォークリフトや貨物移動装置を製造している。このロボットは、安価な民生用グレードの画像センサーの配列を使用して可能な限り多くの方向を監視し、周囲の環境を広く視覚的に把握する。この視覚的掃引には、衝突回避とはまったく関係のない機能も含まれており、これが非常に重要なのだ。 Seegridの自律走行車両(AGV)は、倉庫の天井にある特定の空気ダクトの位置を、特定の棚の上に積み上げられた箱群との関係で認識することができます。これらのロボットフォークリフトは状況認識を構築し、衝突を避けるべきものや、単に目印として機能するものを含むマップを作成します。これらのマップを参照することで、慣れ親しんだ作業スペースを常に再構築するロボットよりも、より迅速かつ自信を持って移動することができます。
ダイソンのアプローチも状況認識機能を構築しますが、カメラの数は少なく、メモリもはるかに少ないです。360 Eye は単一の CCD センサーで動作し、生成したマップを保存しないため、掃除のたびに周囲の世界を理解するための新たな作業になります。言い換えれば、Seegrid ロボットほど機能的ではありません。しかし、それは問題ありません。ダイソンは来年店頭に並ぶ Eye の価格を明らかにしていませんが、Seegrid が既存の産業用車両のロボット化に請求する数千ドルよりは確実に安くなるでしょう。ダイソンのロボット掃除機は、400 ドルから 700 ドルの範囲にある iRobot の Roomba シリーズと価格競争力があるでしょうか? 私の推測では、否です。ダイソンは人間が操作する掃除機の中ではプレミアム価格を設定しているため、最初の自律型モデルでは相対的に価格が上昇することを覚悟してください。しかし、ルンバ(または類似のロボット)をすでに所有していてアップグレードを希望している消費者や、ロボットによる家事の軽減に対するより優れた試みを待ち望んでいる消費者を引き付けるには、それでもなお手頃な価格でなければならない。
確かに、360 Eyeの実際の価格が発表される数ヶ月前(あるいは1年も前)に、ダイソンの低コストなコンピュータービジョンへの取り組みを称賛するのは少々僭越な話だ。実際、シュナイダーエレクトリックは現行カメラの解像度など、詳細な仕様をほとんど明かしていない。2015年の製品発売までにハードウェアが容易に変更される可能性があるためだ。しかし、これらの詳細のほとんどは来年のロボット掃除機ビジネス、つまりダイソンとiRobotの死闘に関係する。ロボット工学というより広い分野にとって、今回のニュースは安価で効果的なコンピュータービジョンにおける画期的な進歩であり、自動掃除というニッチな分野を超えた影響を与える可能性がある。消費者が最も求めているロボットにとって、視覚は不可欠だ。運転、掃除、高齢者介護など、人との近接性を必要とするあらゆる機能を備えた機械は、より有用な目、つまりいわば全方位を見通す巨大な目から恩恵を受けることができる。
ダイソン初のロボットに注目するもう一つの理由は、おそらくこれがダイソンの最後のロボットではないだろうということです。シュナイダー氏は具体的な詳細は明かしませんでしたが、同社がコンピュータービジョン技術のライセンス供与を行っておらず、他の種類のロボットの自社開発も検討し続けていることを確認しました。「このビジョンシステムによって、その可能性は確実に高まります」とシュナイダー氏は語ります。「今後の展開にご期待ください。」
