
米国のロボット設計者は長らく SF と生物学の両方からインスピレーションを得ており、中国のエンジニアも例外ではなく、特に歩行戦闘ロボットに取り組んでいるエンジニアは顕著である。南京理工大学機械工学学院の Dai Jinsong 氏と他の中国人エンジニアは、脚付き自動大砲運搬ロボットの設計に関する長期研究の一環として、中国の兵器設計ジャーナルに 3 つの論文を発表した。研究の規模の大きさから、真剣な取り組みが伺える。最初の論文では、銃の精度のモデル化と 8 本足のデモンストレーターの製作について論じ、2 番目の論文では、テスト プロセスを改善するためのコンピューター支援設計 (CAD) ソフトウェアの適用について論じた。最も重要なのは、3 番目の論文で、8 本の肢のための独自の統合制御システムの構築に必要な、9 チャネル信号ドライバー モジュール、RS-845 通信モジュール、STM-32 同期セットなどのコンポーネントのシステム統合を分析した点である。
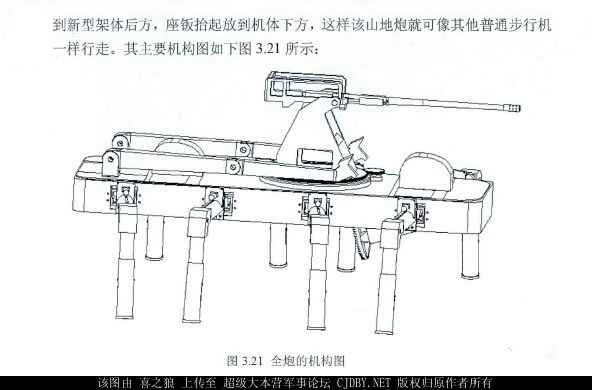
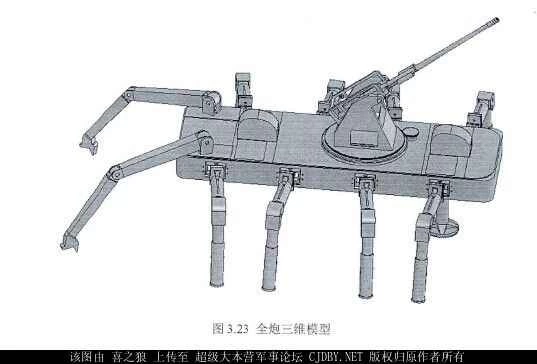
中国製の「カニ歩行機」は、全長約6メートル、脚部を含めた全幅は約2メートルです。機体の両側に4本ずつ計8本の主脚があり、さらに後部には射撃時の安定性を確保するための2本の脚が取り付けられています。さらに前部にも安定脚が1本設置されています。カニ歩行機のサイズは、Mi-26やその将来的な後継機である中露共同開発のMi-46のような大型ヘリコプターで空輸できる規模です。輸送中は、カニ歩行機の3本の安定脚を格納し、より速い移動を可能にします。

現在の設計コンセプトでは、クラブウォーカーの主兵装は30mm機関砲で、これは中国のZBD-86、ZDB-03、ZBL-09歩兵戦闘車にも搭載されています。おそらくこの30mm機関砲は、対戦車誘導ミサイルや迫撃砲といった他の遠隔兵装ステーションに換装できると考えられます。また、30mm機関砲の前後にはバルジが設けられており、通信機器やセンサー機器が収容されていると考えられます。
入手可能なクラブウォーカーの設計画像を見ると、主脚の水平「膝」関節が完全には関節構造になっていないことが示唆されます。これは、アメリカの有名な脚式ロボット「ビッグドッグ」とは対照的で、非常に困難な地形では速度が制限されるでしょう。これは、クラブウォーカーが、より重い車輪式・装軌式車両ではアクセスできない困難な都市部や山岳地帯において、中国歩兵の近接火力支援プラットフォームとして機能することを意図していることを示唆しています。現在の世界のロボット工学の現状を考えると、クラブウォーカーは少なくとも当初は、自ら大型の銃をどこに誰に向けて向けるかを決定するのではなく、人間の操縦者によって操縦される可能性が高いでしょう。
クラブウォーカーは現在設計段階にあり、脚式や車輪式など、様々な無人車両の設計に取って代わられる可能性がある。いずれにせよ、これは中国軍を含む将来の陸戦において、何らかのロボット要素が考慮される可能性を示している。
あなたは興味があるかもしれません:
中国独自の大型犬型ロボット「大犬」
世界最大の「対テロ」演習に中国のドローン、ロシア軍、そしてウクライナ風の軍事演習が登場
サメではなくロボット:中国の大学が長距離無人小型潜水艦を試験
新型インフレータブル中国製ドローン:戦場の気球?
