
DARPAロボティクス・チャレンジ(DRC)決勝戦は、開幕当初からロボット競技者にとって運転が課題となることは明らかだった。先週金曜日、カリフォルニア州ポモナのフェアプレックスで行われた決勝戦に出場した最初のロボットたちは、改造されたポラリス・ユーティリティ・ビークルを持たずに現れた。これらのロボットは、人間にとって危険すぎる災害地帯を模した未舗装の道路を、自らの足でゆっくりと進んでいた。しかし、そこはロボットにとっても非常に危険な場所であることが判明した。車両に乗り込むことさえできない時点で、これらのチームは国防総省が資金提供する2日間の競技会で既に敗北を認めていた。
スピードとポイントの組み合わせで勝敗が決まるコンテストで、彼らは獲得可能なポイントの4分の1を失い、数分で走破できるはずのコースを長時間苦戦しながら走っていた。さらに悪いことに、最初のグループに所属するロボットのほとんどが転倒してしまい、インターネットはその後のロボット落下シーンのNG集を初めて目にすることとなった。これらのチームは決勝戦が始まるや否や敗退し、長年使い続けてきたマシンをコースに送り返し、何度も何度も地面に叩きつけた。
ほとんどのロボットが車の運転をこれほど下手だというのは周知の事実だ。DRC に参加したチームのうち、マシンを車両に搭載する勇気のあるチームの大半は、Polarises をロボットとして使用できる状態にするために、かなり突飛な装置を採用しなければならなかった。たとえば Atlas ロボットは、身長 6 フィートの人型ロボットで、腕と脚が 2 本ずつある。DARPA は複数のチームに Atlas を提供し、決勝に進んだ 24 チームのうち 6 チームが同じロボットに少し改造を加えたバージョンを使用していた。しかし Atlas は、私たち他の人型ロボットのように運転席に座ることができなかった。柔軟性に欠け、バックパックのような巨大なバッテリーを内蔵した上半身がかさばるため、助手席に横向きに座らざるを得ず、脚は車両の外側に垂れ下がっていた。
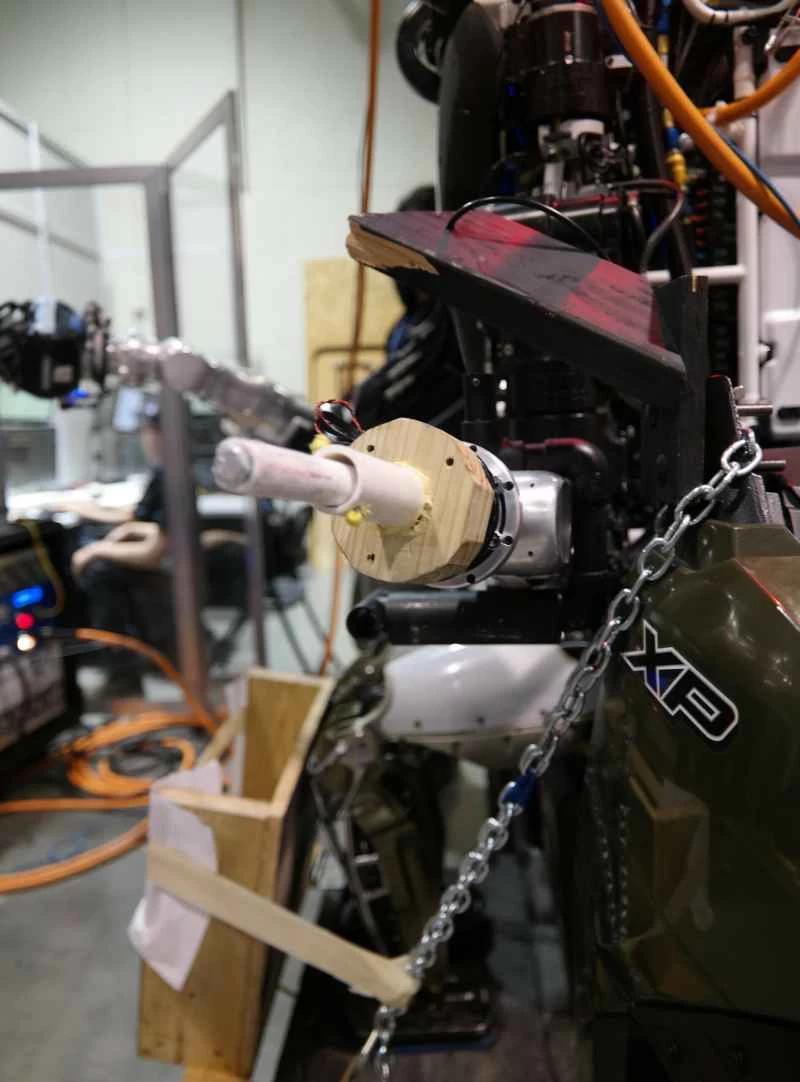
これはアトラスの運転の屈辱のほんの始まりに過ぎなかった。ロボットの長くて猿のような腕をもってしても、アクセルペダルに手を伸ばすのは至難の業だった。そこでチームTRACLabsは、アトラスに義足に相当する上肢、つまりペダルを突くための棒の付いた木の切り株を取り付けた。実際には、突くのはペダルそのものではなく、チームがアクセルの前に配置した木のブロックだった。そしてポラリスを操縦するために、TRACLabsはさらに不可解な装置を作り上げ、ステアリングホイールを車両のロールケージにボルトで固定した木片に接続した。その理由は間違いなく独創的だったが、私には理解できなかった。別のアトラスチームは、ケーブルでつながれた犬のおもちゃを握って何とか車両を操縦していた。
DRC のロボットは、他の課題に加えて、操作の課題に直面していました。認識も問題でしたが、車両の制限速度が時速 10 マイルで、コースの運転セクションが 3 つのジャージー バリアを回避する単純な未舗装の道路だったため、限界がありました。自動運転車を含む多くのロボットの標準センサーであるレーザー距離計を備えた機械であれば、その環境を認識できます。ポラリスから脱出するのは大きなリスクであり、多くのロボットがまさにその際に悲惨な転倒を経験しました。しかし、カーネギー メロン大学の CHIMP を含むほとんどのチームがマクガイバーのような能力を必要としたのは、車両の制御装置を物理的に操作する能力でした。ドア ハンドルや電動工具をつかむことができる、人間に似た 3 本指のマニピュレーター (競技会のタスク全 8 個のうち 2 個) を備えていたにもかかわらず、ロボットにとっては、操作用にまったく作られていないもので操縦する方が簡単でした。 CHIMPは、アームのゴム製キャタピラをハンドルに押し付け、前進または後進させることでPolarisを回転させました。通常、このキャタピラは、ロボットが四つん這いで走行する際に、他の3つのキャタピラと組み合わせて使用されます。しかし、この車両では、このキャタピラが間に合わせのグリッパーとして機能し、CHIMPの2つのグリッパーは使用されませんでした。CMUのロボットには、ペダルに届くように特別なレバーも搭載されており、使用後は脚から取り外すことができます。
これらの回避策は賢明だが、ロボット操作の進歩が驚くほど遅いことの表れでもある。2012年にDRCの詳細が発表されたとき、運転は奇妙だが競争に不可欠な要素のように思われた。大型ロボットのバッテリー電源は不足している――バッテリーセルの数が増えれば重量も増え、これは常に問題だ――そして災害に対応する機械は、目的地に向かう途中で長距離を歩いたり、這ったり、転がったりして限られたエネルギーを消費すべきではない。DARPAが提案する解決策はシンプルだ。車両を徴用するのだ。災害地域の端にいる人間の対応チームがロボットを車両に乗せ、戦闘に送り込むことができる。がれきや屋内に入る必要性などでロボットがそれ以上走行できなくなったら、ロボットは自力で車両から脱出し、内蔵の移動能力を使って走行を続ける。 DARPAは、DRC決勝でチームが獲得できる合計8点のうち2点を運転と降車(車両からの脱出)という2つの別々のタスクにすることで、ロボットのために特別に作られたわけではない環境でも機能するロボットを開発するという競技の目標をさらに強調しました。電動工具も競技の課題の一つだったため、NASAのロボノートに搭載されている5本指のマニピュレーターのような、器用で人間のような手を持つ機械群を想像するのにロボット工学者である必要はありませんでした。
しかし、DRC決勝で5本指の手を持つロボットは、NEDO-Hydraチームのロボットのみで、未完成のため出場を逃した。DARPAは、各チームに最先端の操作技術の向上を促すどころか、ハードルを下げ続け、ソーザルからドリルへと格下げした。ドリルは実際には壁に大きな穴を開けるには誰も使わないような道具であり、車両の改造もどんどん容認した。その結果、ロボットの多くは下半身の柔軟性が制限され、指は3本で関節もほとんど動かないものばかりになった。つまり、彼らは基本的に爪を使っていたのだ。これが、電動工具の握り方を、普遍的に非人間的で非効率的なものにしてしまった。壁に穴を開けるには、多くのロボットがドリルを横向きに持ち、親指に相当する部分でトリガーを引かなければならなかった。NASAのRoboSimianには指は全くなく、手足の先端に2対のコンマ型のフックが付いていた。フックは必要なときのみ前方に回転します。
RoboSimianチームリーダーであり、ジェット推進研究所のロボット工学研究責任者であるブレット・ケネディ氏によると、この設計は意図的にシンプルに作られており、小惑星や彗星など、修理が不可能な遠隔地をローバーが探査する際に故障を防ぐためだという。しかし、コンゴ民主共和国にとっては少し単純すぎたかもしれない。競技の2日目、最終日、RoboSimianはプラグをソケットから抜き、別のソケットに差し込むのに苦労した。最終的にプラグはロボットのグリッパーから外れ、チームは作業を断念した。

とはいえ、奇妙なグリッパーを装備しているにもかかわらず、ロボシミアンはDRCで最も扱いやすいドライバーだった。4本の同じ脚はそれぞれ7つの関節を持ち、信じられないほどの柔軟性を実現している。他のロボットが人間の腕よりも硬く、可動範囲がはるかに狭いという問題に対処しなければならない中、ロボシミアンは片方の脚を所定の位置に折りたたみ、ハンドルの中央を掴んで回転することができた。また、後ろ足を蛇のように伸ばしてペダルに自力で届くこともできた。体重275ポンド、身長4.5フィート(約1.2メートル)のこのロボットは、ロールバーを取り外すことなくポラリスに収まるほど小型だった。「決勝に出場したロボットの中で、ストック車両を運転できるのはロボシミアンだけです」とケネディは言う。
コンテストには他にも優秀なドライバーがいた。その中には、ネバダ大学ラスベガス校が開発したヒューマノイドロボット「Hubo」の「Metal Rebel」もいた。チームリーダーのポール・オー氏は、自分のロボットが劣っていることはわかっていたが、その運転技術を披露したいと考えていた。「ロボットが車を運転しているのを見ると、人は戸惑います」とオー氏は言う。「それは驚きを呼び起こすもので、私たちの研究室はまさにそれをモデルにしています」。実質的に資金提供を受けていないにもかかわらず(過去3年間でいくつかのチームがDARPAから数百万ドルを受け取っている)、UNLVのロボットはDRCのトップ10スコアに入り、運転チャレンジを1分未満で完了した。オー氏が学生と行った練習走行に基づくと、それは多くの人間がかかったであろう時間だ。実際、オー氏は、非ロボット車両を操縦できるロボットを作成するという長期目標に取り組んでいる。 「もし多目的車両を運転できるなら、フォークリフトやトラクターも運転できるはずです。あるいは、船長やパイロットが操縦不能になった場合、船も運転できるかもしれません」とオー氏は言う。「ロボットに操縦桿を握らせて、船や宇宙船、航空機を安全な場所に移動させることもできるはずです。」
Oh 氏の構想は、ロボット工学コミュニティでは必ずしも一般的ではなく、DRC の全体的な結果によって十分に裏付けられているわけでもない。コンテストで優勝した Team KAIST も、Hubo ヒューマノイド ロボットを使用しており、車両を改造する必要があった。2 位の IHMC Robotics は、独自の変わった運転補助装置を備えた Atlas を使用していた。そして、コンテストの最終日に首位に立っていた CMU の CHIMP は、昨日バリケードに衝突することで、最後の悲惨な走行を開始した。DARPA 職員は過剰反応し、ロボットだけでなく、ロボットの Polaris も停止させた (車両がオフになったら、CHIMP の電源を切る必要はなかった)。CHIMP は最終的に他のタスクに進んだが、前日のパフォーマンスに基づいて最終的に 3 位となった。つまり、DRC の優勝者はすべて、短距離を走行するために何らかの急ごしらえを必要とした。そして、実際に 1 台が衝突した。
一方、ロボシミアンは5位に終わり、賞金獲得には2つ及ばなかった。しかし、オー氏の言う通り、ロボットが将来的に工場出荷のトラクターを操縦したり、飛行機を安全に着陸させるために行動を起こしたりできるようになるとすれば、それらの機械の運転手やパイロットが必ずしも人間型である必要はない。わずかに類人猿のようでありながら、ほぼ非人間的なロボットが、農場、あるいは世界を救うことになるかもしれないのだ。
さて、フックについてですが…
