
激しく転んで腕を骨折したら、体はパチパチと音を立てるほどの速さで異常を知らせてくれます。しかし、ロボットにはニューロンがないため、人工の体に何が起こっているのかを知る手段が必要です。
コーネル大学機械工学准教授のロバート・シェパード氏は、ロボットが自律的に動作するものの、手足が負傷する未来を想像してみてほしいと述べている。「ロボットは手足を動かし続け、手や足が実際には別の位置にあるのに、ある位置にあると思い込んでしまうのです」とシェパード氏は語る。「この情報を三次元的に、そして継続的にロボットのコントローラーに伝えるために、皮膚、つまり神経のような内部センサーが必要です」
シェパード研究室は、泡、光、そして人工知能を組み合わせたシステムを開発しました。これにより、泡が上下に曲がっているのか、ねじれているのか、あるいはその両方なのかなど、泡に何が起こっているのかを感知することが可能になりました。この研究成果は本日、 Science Robotics誌に掲載されました。
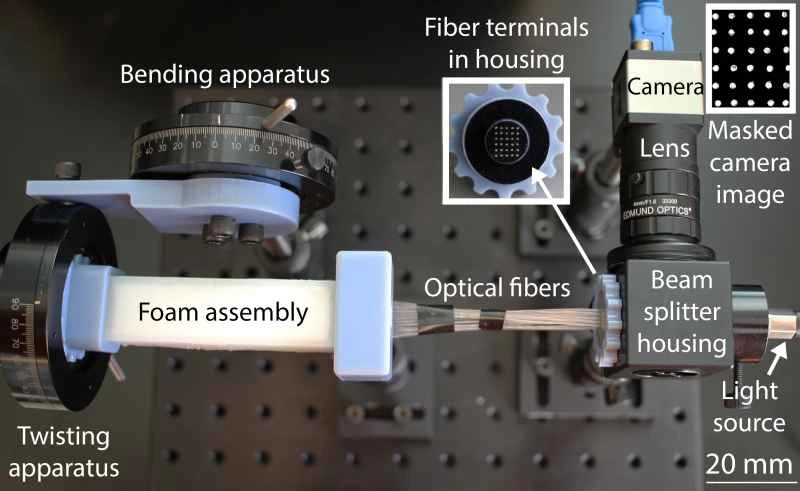
仕組みはこうです。鍵となるセンサーは、シリコン製のフォーム内に埋め込まれた30本の光ファイバー層です。光ファイバーはフォームの一端から突き出ており、他の機器に接続されています。光ファイバーの端から発せられる光の強度から、システムはフォームの状態を把握します。フォームが静止しているとき、光は特定の方向に反射します。フォームが曲がったりねじれたりすると、光は変化します。
「したがって、光の強度の全体的なパターンの変化を観察することで、形状の変化を検出できるのです」と、コーネル大学機械工学科の博士課程の学生で、この泡について説明した論文の第一著者であるイルセ・ヴァン・メールベーク氏は言う。
人間には当然、自分の体に何が起こっているかを解釈する脳がありますが、このフォームには頭脳がありません。その役割を担うために、研究者たちは人工知能(AI)に着目しました。AIを構築するにあたり、研究者たちはまず、フォームを既知の方法で曲げたりねじったりした際に、ファイバーから発せられる光がどのように変化するかという情報を収集しました。このデータを用いて、今後フォームに何が起こっているかを解釈するために使用できる機械学習モデルを訓練しました。
これは、研究者が柔らかいロボットがどのように伸びているかを見るために使用できる唯一の感知戦略ではありません。柔軟な電子センサーは電流の変化を使用してロボットがどのように伸びているかを認識し、一方、シェパードの研究室では以前の研究で伸縮性のある光ファイバーを使用して何かが変形したかどうかを測定しました。
もちろん、このようなセンサーはロボットが自分自身や周囲で何が起こっているかを把握するために不可欠です。「ロボットは世界の中で自分自身の存在を認識する必要があります」と、新論文の筆頭著者であるシェパード氏は言います。
現在、コーネル大学におけるフォームとAIの実験設備には、フォームの外部に装備されている機器が使用されていますが、ヴァン・ミーアビーク氏は、自己完結型で自己感知機能を持つフォーム設備を目指し、すべてを小型化することが可能だと述べています。彼女がこの種のセンサーシステムの応用例として挙げているのは、「ロボットが自ら歩く方法を学習する」ことです。「ロボットは自身の形状を感知できなければなりません」と彼女は言います。
