「私たちのロボット『アキレス』は、生物学的に正確な歩行を実現した初めてのロボットです。つまり、人間のように動くだけでなく、人間の神経系のように脚に指令を送ることができるのです。」
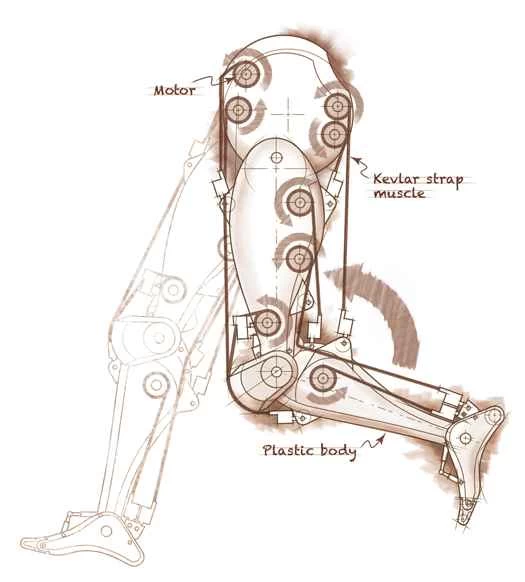
それぞれの脚には8つの筋肉があり、片方の端はモーター、もう片方の端はプラスチック製の骨格に接続されたケブラー製のストラップでできています。モーターが回転するとストラップが引っ張られ、人間の筋肉の収縮を模倣します。アキレス腱の筋肉の一部は、股関節や大腿部から下腿まで伸びており、脚全体に力を伝達することができます。これにより、ほとんどのモーターを股関節と大腿部に配置することができます。モーターを高い位置に配置することで下腿が軽くなり、人間の下腿のように素早く振り回すことができます。
人間の場合は、脊柱のニューロンがリズミカルな信号を送り、脚を制御します。これはメトロノームのようなもので、脚からの感覚フィードバックによって歩幅が調整されます。脳は調整を行うことができますが、すべての筋肉を明示的に制御しているわけではありません。だからこそ、人間は無意識に歩くことができるのです。私たちのロボットでは、外部PCで動作するコンピュータープログラムが同様の方法で動きを制御します。一歩ごとに、コンピューターは片方の股関節の筋肉を曲げ、もう片方の筋肉を伸ばす信号を送ります。コンピューターは、脚の荷重センサーと角度センサーからのフィードバックに基づいて、これらの信号のタイミングを調整します。同様の制御システムが下半身の筋肉も制御します。
人間の動きをモデル化することは、ロボット工学以外にも応用できます。例えば、脊髄損傷からの回復過程を理解するのにも役立つかもしれません。しかし、私たちのロボットはまだ非常に簡略化されたモデルで、胴体がなく、複雑な地形に対応できません。また、当初は足が滑ってしまうという問題もありました。足のグリップ力を高めるために様々な種類のゴムを検討しましたが、最終的に解決策が既に存在することに気づきました。現在、ロボットはKedsのスニーカーを履いています。

—オービタル・サイエンシズ社のエンジニアであるテレサ・クライン氏は、アリゾナ大学の大学院生時代にアキレスを開発した。
