
モジュラーロボティクス(小型ロボットが合体して大型ロボットを形成する)を初めて実用化したのが、Modular Roboticsという企業だったというのは、まさにうってつけだ。「学術分野の名前を拝借して社名を作ったんです」と、CEO兼デザインディレクターのエリック・シュワイカート氏は語る。「そのことについて、少しも後悔はしていません」。
シュワイカート氏が指摘するように、ロボットは様々なタスクや環境に組み合わせ、適応できるという驚異的な可能性を秘めているという論文が数十年にわたって発表されてきましたが、いずれも同じ悲しい結末を迎えています。研究者たちは、自らが記述または設計したシステムを、近い将来に実際に応用できる形にまで至っていないのです。例えば、MITが先月発表した自己組み立て式モジュラーロボットについてご存知かもしれません。しかし、これらのロボットは、多くのロボットと同様に、研究のために生まれ育ったものであり、実験室以外での利用は想定されていませんでした。そこで、コロラド州ボルダーに本社を置くこの企業は、ロボット工学という分野全体の名称を借用するだけでなく、さらに一歩踏み込み、実際にモジュラーロボットを開発したのです。
2011年に発売された最初のシステムは、様々なプロセッサ、センサー、アクチュエーターを備えたブロックのシリーズ「Cubelets」だった。商業デビューとしては刺激的で、ロボットの集合体をいかにして瞬時に再組み立てし、別の用途に転用できるかを示した。しかし、同時に非常に質素で、簡単に見過ごされがちだった。組み立てられた作品は、特に印象に残るわけでも、優れたおもちゃでもなかった。熱から身をよじらせたり、持ち上げると警戒するように光ったりといった、数秒でその面白さを失ってしまうような行動だ。組み立てること自体に喜びはあったものの、完成した作品はそれほど楽しいものではなかった。
今朝Kickstarterで発表された、Modular社によるブロックロボット開発の第2弾「Moss」。最初のユニットが支援者(あるいは興味津々のジャーナリスト)の手に届くまでには数ヶ月かかるものの、このおもちゃは真の商用モジュラーロボットとなり、より強力なシステムへの道を開く可能性を秘めている。
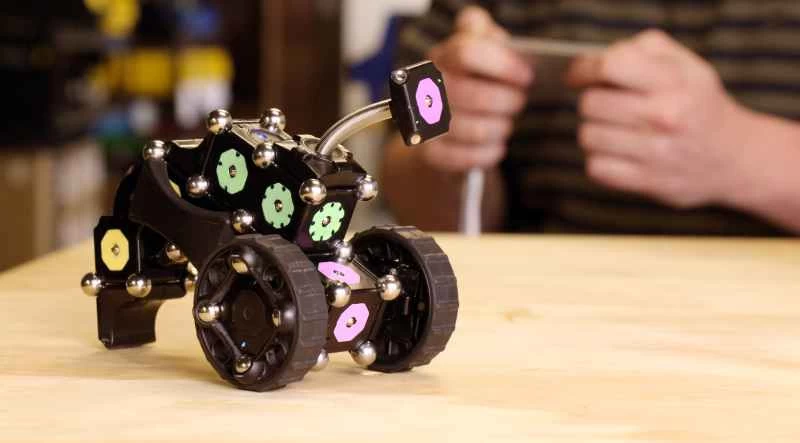
Moss のデザインには、ブロック間のデータと電力を転送するための単一の接続など、多くの利点があります。しかし、おそらく最も革命的となる可能性のある要素は、おもちゃが希土類磁石を使用していることです。これらの磁石は、主にキューブの角に配置されています。ツールを使わずにロボット同士を接続する方法を提供するだけでなく、これらのネオジム磁石のボールは、部品をヒンジで動かしたり自由にスイングしたりできるジョイントとして機能します。これはちょっとした天才的なひらめきです。多用途の構造につながるという理由もありますが、ロボットは悲しいことに壊れやすく、ほとんど自殺行為に近い存在であり、環境や自分自身にぶつかって自分の部品を壊しがちです。Moss ボットが複雑で複数のヒンジが付いた付属物を椅子の脚に叩きつけたら、脚が折れてしまう可能性があります。しかし、それを再び取り付けるのは、磁石を元の位置に戻すのと同じくらい簡単なはずです。これがモジュラーロボットのコンセプトの重要な利点の一つです。組み立てられたロボット全体が壊れるのではなく、段階的に故障したり分解したりしても問題ありません。この特性は、このクラスのロボットのもう一つのユニークな利点、つまりロボットの再配置能力に繋がります。新しい地形に対応するための新しい移動モード(市街地用の踏面、森林用の脚など)を追加したり、様々な役割に対応するための新しい形状やサイズを追加したりできるのです。
Mossはおもちゃですが、モジュール式ロボットは必ずしもそうである必要はありません。このおもちゃの設計と製造から得られた教訓は、実際の仕事を持つ適応型ロボットの大量開発につながる可能性があります。Modular Robotsはおもちゃ以外の具体的な研究開発活動については触れていませんが、シュワイカート氏は、今後数年間でモジュール式ロボットが、高度に特殊化された単一任務ロボットの代替として、製造業などさまざまな業界で汎用性が高くカスタマイズ可能なロボットとして登場する可能性があると考えています。
今のところ、Moss はモジュール式のおもちゃであり、Romo、Sphero 2.0、Anki など、驚くほど強力でプログラム可能なおもちゃロボットの成長中の仲間入りを果たした。Shogun Tank (アーティストが作成したセットの計画シリーズの第 1 弾) などの Moss ボットは、Bluetooth 経由で直接リモート制御できるように設定できる。より野心的なユーザーは、API を詳しく調べて、走行、障害物の回避、ダブル クリックの音を聞いて Nerf スタイルのダーツを発射するなど、プリロードされた自律動作を調整したり、環境内の壁を数えて動的な内部マップを作成するなど、まったく新しい動作を作成したりすることもできる。ただし、そのレベルの制御には、C プログラミング言語を学習するか、少なくともいじくり回す必要がある。Schweikardt 氏は、最終的にはこの言語を使わずに済むことを望んでいる。 「もう誰もがプログラミングを学ぶべきだとは思っていません」とシュワイカート氏は言う。かつては批判的思考力を身につけられるので、プログラミングを学んでいた。しかし今では、あらゆるマイクロコントローラーのあらゆる機能にアクセスするためにコードに苦労するのは退屈で、人々がロボットで本当にやりたいこと、つまりロボットにクールなことをさせるという目的とは無関係に思えるのだ。
Modularは最終的に、より直感的なプログラミングオプションを提供したいと考えています。その中には、有限状態機械と呼ばれるアプローチも含まれます。具体的な内容は複雑ですが、より抽象的なコマンドを可能にする計算モデルです。ロボットにエリアを巡回させて移動する標的に射撃させる超高精度な値を入力したり、無数の不測の事態に備えて距離や高度を指定したりする代わりに、システムはその全機能を提示し、プログラマーが点と点を繋げて「動くものなら何でも撃て!」と指示できるようになります。
Moss は、他のロボット玩具と同様に高価で、比較的に残念なスターターキットが 59 ドルですが、もっとエキサイティングなキット (Shogun Tank など) は 299 ドル以上します。これらは Kickstarter での出資額ですが、出資者は比較的安心して投資できるはずです。Schweikardt 氏によると、同社は Kickstarter をマーケティング ツールとしてのみ使用しており (「2013 年に製品を発表するには、これが方法です」)、Modular はすでに Moss の製造能力に少なくとも 50 万ドルを投じています。Kickstarter の出資者は最初にロボットを入手しますが (2 月)、小売モデルもすぐ後に続き、2014 年のホリデー シーズンに間に合うように、より広く主流のリリースが期待されます。多くのハードウェアベースの Kickstarter 製品とは異なり、Moss は存在し続けると言っても過言ではありません。そして、最初に入手した人は、単に素晴らしいロボット玩具を最初に入手できるだけではありません。彼らは、ロボットが私たちの共同生活の中に再び組み込まれる前に、ロボット工学の最も優れたアイデアの 1 つを実際に手に取ることになるでしょう。