
来年末までに、ロボットは被災地に足を踏み入れるだろう。車輪で転がったり、踏ん張ったりして現場に駆けつけるわけではない。瓦礫の上を大股で歩き、そのほとんどは二本足でバランスを取りながら進む。人間の救急隊員と比べると、ロボットの動きは遅く、頻繁に停止する。しかし、スピードの不足は、耐久性と使い捨てという点で補える。化学火災でロボットの肺が焼け付くことはなく、ガンマ線によって寿命が短くなることは悲劇というよりは、物流上の問題に過ぎない。
ロボットは、福島原発事故でロボットができなかったことをこなす機動力を備え、ドアや階段、破壊されたインフラ、その他無数の障害物に満ちた劣悪な環境で繰り広げられる危機を切り抜ける。これまでのヒューマノイドロボットはカーペットの縁をよじ登るのがやっとだったが、これらのシステムははしごを登り、自ら運転する車両に滑り込む必要がある。ドアノブを回せる能力は、今や一流のロボット研究室でさえも称賛されるほどだが、これらのロボットは開けられるドアは開け、開けられないドアは電動工具を使ってハンマーやノコギリで切り開くだろう。
災害は通信能力を低下させたり遮断したりする傾向があるため、代替ロボットは驚くほど多くの責任を負うことになるだろう。ジョイスティックやセンサーグローブを装着した人間が遠隔操作する遠隔操作システムはほとんど、あるいは全く存在しないだろう。ヒューマノイドは遠く離れた人間からの指示を受けるが、ソーザルの正しい持ち方、切断開始位置、切断時間などは独自のアルゴリズムで判断する。
ロボットたちが歩み寄ることになるこの大惨事は、実は昨年10月に開始された2年間にわたるDARPAロボティクスチャレンジのために作られた障害物コースなのだ。このチャレンジで200万ドルの賞金がかけられる。この賞金は、12月に行われる直接対決で高得点を獲得するだけでなく、2014年に開催される2回目の対決でも優勝したチームに授与される。ロボットたちは8つの異なるタスクをこなし、人間の救急隊員にも求められるであろう機動性と操作性の両方を披露しなければならない。
「ハリケーン・カトリーナから福島、そして今回のスーパーストーム・サンディに至るまで、次々と起こる災害で私たちが目にしてきたのは、災害の初期段階で人間ができることにはしばしば明らかな限界があるということです」と、このチャレンジのプログラムマネージャーであるギル・プラット氏は語る。「DARPAは、状況があまりにも危険である場合には、ロボットが人間の代わりに行動できると考えています。」
競技規則では明確にヒューマノイド型のデザインは求められていませんが、課題と環境を考えると、ヒューマノイド型ロボットを選択するのは理にかなっています。ドアノブの高さからブレーキペダルの配置まで、ほぼすべてのものが直立歩行する生物に合わせて配置とプロポーションが調整されます。災害時に私たちが最も心配するのは、人間が生活し、働く場所です。私たち人間をイメージして作られたロボットは、まさに理想的な選択肢です。
競技の課題をほんの数個達成するだけでも、驚くべき偉業となるだろう。8つ全てをクリアできれば、さらに大きな成果となるだろう。それは、有能で堅牢な、実用的なヒューマノイドロボットの誕生を意味するかもしれない。そのようなロボットは、人類がかつて行ったが、二度と行くべきではない場所へと足を踏み入れることができるだろう。有毒ガスの煙やメルトダウンした原子炉へと闊歩し、人工世界の新たな廃墟へと足を踏み入れるのだ。これらのロボットは英雄となるかもしれない。
私に向かって歩いてくるロボットは、確かに迫力がある。顔は黒く、特徴のない平面で、まるで暴動鎮圧用のヘルメットを閉めたようなものだ。重さ26.5ポンド、高さ5フィート(約1.5メートル)の残りの部分は、白いプラスチックか、むき出しの合金でできている。もしじっと立っていたら、このロボットはむしろ威圧的に見えるかもしれない。
しかし、CHARLI-2は動いている――それもぎこちなく。緑のフェルトと白いテープで覆われたミニチュアサッカー場の上を、小さな一歩ごとに全身を震わせながら、よろよろと歩いていく。歩きながら手を振り、まるで愛想の良いセレブのふりをしている。高くなったフィールドでスペースがなくなると、指のない白い腕で頭を掻く真似をする。ありがたいことに、CHARLI-2は端からよろめき落ちることはない。腰を曲げることができないため、立ち上がるだけの柔軟性がないのだ。
ここは、バージニア工科大学ロボティクス・メカニクス研究所(RoMeLa)の試験場です。同研究所は、バージニア工科大学の地下階にある窓のない部屋をいくつか占めています。RoMeLaのロボット、特に脚を持つロボットはすべて、この約9メートル四方のプラットフォームで最初の一歩を踏み出します。このプラットフォームは、毎年開催されるロボカップの練習場としても使われています。CHARLI-2は2012年のロボットサッカー大会で同部門優勝を果たし、ヒューマノイドとしては世界クラスの自律性、敏捷性、そしてスピードを証明しました。
しかし、その歩行速度は最高でも秒速約50センチで、これは平均的な人間の歩行速度の2~3倍に過ぎない。二足歩行ロボットの開発者たちは、まるで新米の親のようだ。自らの創造物であるロボットの基本的な歩行に驚嘆し、つまずいたり転んだりするたびにそれを振り払い、あらゆる挫折や成功を、いかにうまくコントロールされた期待と照らし合わせながら、見守っている。この点で、CHARLI-2は誇らしげな幼児のようだ。
しかし、その時代は既に終わりに近づいている。後継機がすぐそばに立ち、試されるのを待っている。
このロボットは幼児のようなロボットではありません。まだ開発中のこのロボットは、巨大なアルミ製の脚と下半身だけで、上半身、腕、そして頭部はどこにも見当たりません。しかし、既存のパーツは力強さを感じさせます。自転車のポンプのような長いアクチュエータが脚に沿って走り、腰の部分まで扇状に広がっています。このプロトタイプは、最終的にTHOR(戦術的危険作戦ロボット)と呼ばれることになる機械の基礎となるものです。
「CHARLI-2は古い技術です」と、ロメラのディレクター、デニス・ホン氏は言う。そして、未完成のロボットを指差した。「これは未来ですが、大きな条件があります。成功すればの話ですが。歩くことはできますが、本当にDARPAが求めることをすべてこなせるのでしょうか?」

チームTHORは、RoMeLa、ペンシルベニア大学、そして2つの民間ロボット企業の研究者で構成され、ホン氏がチームリーダーを務めています。DARPAロボティクスチャレンジ(DRC)の初トライアルは12月まで行われませんが、チームは既に同コンテストで最も名誉ある賞の一つを獲得しています。トラックAに選出された7チームのうちの1チームであり、ハードウェアとソフトウェアの開発に最大400万ドルの助成金を受ける資格を得ています。
しかし、チームTHORが有力候補の1つに数えられるのは、この功績だけではありません。RoMeLaの過去の成功、CHARLI-2や、同じくロボカップでサイズクラス優勝を果たした同研究室の小型ヒューマノイドDARwInでもありません。ホン氏の秘密兵器は、この部分的なヒューマノイドです。彼の研究室は、このロボットコンテストが発表される約1年前から開発に取り組んでいました。これは、同様に不可能に思えるヒューマノイドプロジェクト、SAFFiR(船上自律消防ロボット)のプロトタイプでもあります。
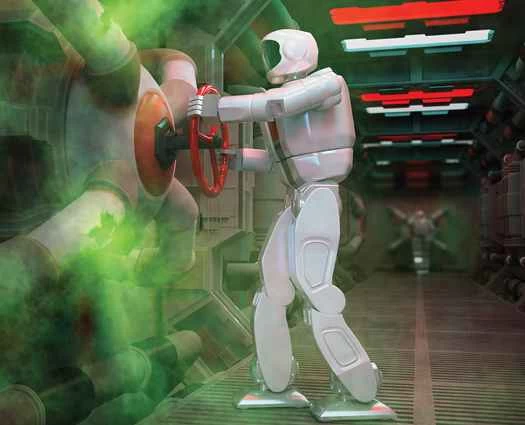
SAFFiRは、海軍研究局(ONAS)が委託した、頑丈で超高性能な消防ロボットの開発契約の一部です。その任務はDARPA(国防高等研究計画局)が提案したものと似ています。危険な場所へ足を踏み入れ、視界の悪い場所を航行し、不安定な環境(今回の場合は海上の船のホールやデッキ)でバランスを保つ必要があります。しかし、SAFFiRの任務はTHORとも異なります。人間の音声とジェスチャーによる指示に従い、消火器を炎に投げ込んだり、バックパックに搭載されたシステムを使って至近距離からホースで水を噴射したりする必要があるのです。

SAFFiRは、ホン氏のチームに明確な先行機会をもたらす。両プログラムの目標は重複しているため、SAFFiRで行われた研究はTHORにも適用でき、その逆もまた同様だ。同じ基本工学を、異なるツールと機能に特化した形で提供することで、最終的には両方の任務を遂行できる可能性がある。これが理論上、ヒューマノイドロボットの利点である。船舶に見られる高い「ニーノッカー」ドア敷居をまたぐことや、陸上の災害現場で移動する瓦礫の上を這うことなど、幅広いタスクに適応し、遂行できる能力だ。
これまで、チームTHORはほぼ完全に移動能力に焦点を当ててきました。ハンドルや電動工具、はしごの段を握るといった操作性は将来的に重要になりますが、迅速かつ安定して移動することが最も喫緊の課題です。結局のところ、ヒューマノイドが確実に任務を遂行できなければ、エアハンマーへの対応力など誰が気にするでしょうか?
二足歩行は、ヒューマノイドロボットにとって常に大きな可能性と危険性を秘めてきました。二足歩行によって、特に人間向けに設計された環境において、機械は様々な環境をより良く移動できるようになるでしょう。しかし、それは非常に困難で、また非常に危険でもあります。ほぼあらゆる転倒が壊滅的な事故につながる可能性があるのです。だからこそ、CHARLI-2のようなロボットは、一般的に位置制御と呼ばれるシステムを用いて、各足の正確な位置を慎重に調整しながら、慎重に歩を進めているのです。
CHARLI-2やホンダのASIMO(ディズニーランドのトゥモローランドで独自のショーを歩き、跳ね、踊るヒューマノイドの「ヘルパー」)のようなロボットは、通常、関節にアクチュエーターが埋め込まれており、回転して各脚を曲げたり伸ばしたりできます。歩行速度が速まるとモーターの回転速度が速くなりますが、ロボットは機能的な速度限界に達します。人間が走り出すときのように勢いに任せることはできません。関節が硬すぎるため、アルゴリズムは手足の位置を常に計算する必要があります。不均衡と回復の間を刻々と揺れ動く人間のようには動きません。位置制御のみを使用するロボットは、足元の地形の正確な形状を把握する必要があります。
それに比べて、RoMeLaの新しいロボットは力制御を組み込んでおり、設計と機能ははるかに生物学的なものです。「主な違いは、直線状の弾性アクチュエータです」とホン氏は言います。「私たちのロボットは人体の解剖学に着想を得ています。私たちのアクチュエータは、人間の筋肉のように伸縮します。」

細長い円筒形のアクチュエーターは、おおよそ筋肉が動く位置に配置され、筋肉のように動作します。チタン製のスプリングが歩くたびに衝撃を吸収し、一歩から次の一歩へ跳ね返る弾力性を提供します。これらの特性により、ロボットは力の制御も使用できます。つまり、作動速度を上げて、シミュレートされた筋肉をより激しく動かし、位置制御ソフトウェアが各足踏みを完璧に予測できない場合に発生するアルゴリズムのパニックを無効にすることができます。その結果、バランスを回復する機会も増えます。CHARLI-2 は脚が固くてすぐに転倒してしまうかもしれませんが、この設計ではよろめきをしゃがむ動作に変えようとします。力と位置の制御のバランスをとることで、ロボットは人間のより自由で即興的な、そして究極的にはより効率的で力強い動きをすることができます。
筋肉のようなアクチュエータと、より適応性の高い制御方式の利点は、速度と安定性の向上、そして従来の臆病な二足歩行ロボットの終焉となるだろう。このロボットは、一歩一歩が文字通りバネのように力強く、地形を飲み込むような長い歩幅で移動する。そして、必要に迫られて、大胆に移動する。
* * *
DARPAがDRC(コンゴ民主共和国)向けに発表した広範な機関概要を初めて読んだとき、ニコラウス・ラドフォードはためらった。国際宇宙ステーションで現在試験中のNASAのヒューマノイドロボット「ロボノート」の副プロジェクトマネージャーとして、彼はヒューマノイドロボットのできることとできないことを熟知していた。「まるで6歳児が書いたみたいだった」と彼は言う。「それに、車を運転させたり、はしごを登らせたり、ポンプを操作させたりもするんだ!」
DRCは設計上、誇張された設計となっており、間違いなく史上最も過酷なロボットコンテストと言えるでしょう。その大胆さはエンジニアたちを魅了してきました。ホンダという明白な例外を除けば(そして、締め切りがもっと遅い、資金提供のないトラックDにはアシモが登場する可能性もある)、DRCは世界最高峰のヒューマノイドロボット研究室を惹きつけています。トラックAには、チームTHORに加え、NASAから2チーム、カーネギーメロン大学(DARPAの前回のロボットコンテストである自動運転カーレースで優勝した大学)、東京大学発の企業、そして防衛関連企業レイセオンからのワイルドカードエントリーが参加しています。
トラックBとCのチームはソフトウェアのみを設計しますが、ボストン・ダイナミクス社(四足歩行ロボット「BigDog」で有名)製のロボットを使用して競います。ボストン・ダイナミクス社がPETMANとAtlasのプロトタイプをベースに開発したこの政府提供のロボットは、現在最も有能なヒューマノイドロボットの一つになりつつあります。強力な油圧アクチュエーターにより、隙間を飛び越えることが可能です。2014年の決勝戦には、全トラックの総合得点上位8台のロボットが出場するため、ボストン・ダイナミクス社のロボットとトラックAの優秀なロボットとの激突はほぼ確実です。

不確かなのは、最終選考に残るロボットのうち、8つの課題すべてを物理的に完了できるロボットがいるかどうかだ。まず、移動の課題がある。ロボットは瓦礫の上や工場地帯を移動しなければならない。しかし、長時間にわたって不整地を移動できる能力を実証したヒューマノイドロボットはまだなく、昆虫からヒントを得た6脚ロボットは、より安定しているものの、岩や瓦礫の上を非常にゆっくりとしか移動できない。チームTHORは、ここで自社のアクチュエータが大きな強みになると考えている。東京を拠点とするSCHAFT Inc.チームも、これまでに極めて堅牢なヒューマノイド下半身HRP3を実証している。このロボットの堅固なバランスと強力な液冷式モータードライバーは、大きな強みとなるだろう。THORとSCHAFT Inc.のロボットはどちらもはしご登りに適している。ホン氏によると、はしご登りは、力強い脚力だけでほぼ完全にこなすことができ、ロボットが倒れないように手で横木の段を掴むだけで済むという。
ドアを開けたり、漏れているバルブを閉めたりする操作ベースのタスクは、それほどリスクが高くない。ドライバーの不器用さがロボットを競争から脱落させる可能性は、顔面からの落下よりもずっと低い。しかし、今のところ、参加者のいずれも明らかな優位性を持っていない。ジョンソン宇宙センター(JSC)のラドフォードのチームは、極めて器用な5本指の手を持つロボノートから一部派生したコア技術を持つロボットを出場させている。ロボノートはすでに、宇宙飛行士が船外活動中に使用するツールやインターフェースを自律的または遠隔操作で操作できる。JSCの無名の参加者がロボノートと同じくらい機敏で、チームがコース上のさまざまな目的地に到達できる下半身を追加すれば、部品の交換や電動工具の使用などのタスクで素晴らしいパフォーマンスを発揮するかもしれない。
人間中心の課題にもかかわらず、最も汎用性の高いロボットが全く別の形態をとる可能性もある。ヒューマノイドロボットがまだ私たちの生活に浸透していないのには、十分な理由がある。私たち人間の二足歩行二腕の生理機能を鋼鉄とリチウムイオン電池で再現するのは困難だからだ。「人間の歩行エネルギー効率は、最高のヒューマノイドロボットの15倍です」とラドフォード氏は言う。「そして、人間の脂肪は電池の30倍の密度でエネルギーを蓄えます。これは、そのままの状態では、ヒューマノイドシステムにとって大きな不利な点です。」
「ロボットは人間の進化に縛られる必要はありません。特定の場所にカメラが必要になったら、そこに設置するのです。」カーネギーメロン大学のトラックAエントリーである霊長類に着想を得たCHIMPは、障害物をよりスムーズに乗り越えるために、二肢から四肢へと自由に動きを変えることができます。NASAジェット推進研究所(JPL)のもう一つのトラックAチームは、四肢を持つRoboSimianのバージョンを投入する予定です。RoboSimianは、バイオメカトロニクスの多様性を融合させたもので、そのデザインと動きはサルであると同時に海の生き物にも似ています。
「DARPAロボティクス・チャレンジに参加するロボットの中には、ヒューマノイド型のものもありますが、そうでないものもあります」とDARPAのプラット氏は語る。「私たちが目指しているのは、人間との互換性です。」CHIMPかRoboSimianが優勝すれば、200万ドルの賞金獲得を目指す他のチームのチャンスが潰えるだけでなく、ヒューマノイドロボットの分野全体を根本的に変える可能性もある。つまり、人間のように動くことよりも、人間のように見えることがより重要になる仕事へとロボットが移行していくということだ。四足歩行ロボットの方が有能なのに、なぜ二足歩行のヒーローを追求するのだろうか?
JPLは、RoboSimianの開発にあたり、自然界の広範な領域から特性とアプローチを厳選しました。触手のような形状とほぼ放射状の対称性は、ヒトデを模倣しています。「人間はこうした非常に派生的な構造を持っています」と、JPLのロボット車両・マニピュレーターグループのスーパーバイザー、ブレット・ケネディ氏は言います。「頭や首、そして体の他の部分の配置は、視覚などの特定の機能を必要な場所に配置することを目的としています。しかし、ロボットは人間の進化に制約される必要はありません。特定の場所にカメラが必要であれば、そこに配置します。」
RoboSimianには前面、背面、側面がない。そして、その極めて効率的な設計は、12月まで明らかにならない方法で、RoboSimianを手強い競争相手にする可能性があります。他のロボットがユーティリティビークルに乗り降りするときに、笑えるほどぎこちなかったり、危険なほどバランスを崩したりするのに対し(ヒューマノイド型ロボットは回転して方向転換する必要がある)、RoboSimianは簡単にカニ歩きで運転席に移動できるはずです。また、JPLは優秀な火星探査車3台を派遣したことで、限られたエネルギーと通信回線で、過酷で予測不可能な環境でロボットを機能させる方法を学んでいます。これらのシステムはコマンドに応答しますが、地球と火星の間には8分の無線ラグがあるため、ほぼすべてを自律的に実行する必要があります。ケネディと彼のチームにとって、DRCは単にオフィスでの1日の業務に過ぎないかもしれません。
数年前、ロボシミアンの前身の一つでケネディと共に働いたホン氏は、トラックAのどのチームからも厳しい競争が予想されるとしている。しかし、JPLには存在そのものを脅かす脅威があると彼は考えている。「非ヒューマノイド型は本当にあれだけのことをできるのだろうか?」とホン氏は言う。「もしできるなら、ヒューマノイドが必要な理由という私の理念が完全に崩れてしまうだろう」――人間の環境で操縦するためだ。「でも、もしできないなら、それは我々にとって良いことだ」と彼は言う。「それは私の考えが完全に間違っていることを証明するか、あるいは完全に正しかったことを証明することになるかもしれない」
CHARLI-2が通過したのと同じ試験場で、THORとSAFFiRの前身となるロボットが、その日の最初の一歩を踏み出した。このロボットには真の威嚇性がある。動くたびにアクチュエータがキーンと音を立て、胴体の頂点にある青い表示灯は、ほどよい不気味さを放っている。車輪付きのカーボンファイバーとアルミニウム製のガントリー(落下時の受け止め役として)に固定され、オレンジ色の警告灯と真っ赤な緊急停止ボタンが付いた状態で歩行する。まだ製作中の腕は、成人男性とほぼ同じ強度を持つ。しかし、脚は超人的だ。RoMeLaのチームメンバーによると、かかとと足首の間に緩衝材として設置したアルミニウム合金が、予期せず脚で切断されたという。このロボットは、チームの予想以上に強力で、目で追うよりも速く脚を振り回すことができる。
しかし、その動きはSFの悪夢のようなものではない。その力強さと筋肉の発達にもかかわらず、プロトタイプは遅い。もちろん、歩行開始からまだ3日目で、使用しているアルゴリズムはCHARLI-2から借用したもの。そのため、歩幅は長く、アクチュエータは高速化しているものの、最終的な速度のほんの一部しか確認できていない。RoMeLaは、二足歩行ロボットがエネルギーをより効率的に使用できることを証明したいと考えている。もし直線状の弾性アクチュエータが期待通りに機能すれば、生体とロボットの効率格差を埋めることができるかもしれない。歩行時に人間の5倍しかエネルギーを消費しないヒューマノイドロボットは、工学における大きなブレークスルーとなるだろう。
ロボット工学において電力は常に懸念材料となるが、今日のテスト歩行においては特に問題となる。このヒューマノイドの設計の利点の一つは、アクチュエータが各ステップで少量のエネルギーを回収できることである。これは回生ブレーキに似ている。
ハイブリッド電気自動車に乗っている。ところが、右膝が調子を崩している。エネルギーを過剰に回収しようとしたため、電流が急上昇し、自動停止が作動してロボットが転倒する。少なくとも、それが仮説だ。その後、ロボットが静止し、自力でバランスを取ろうとしている時に、ホンはマシンに飛び乗った。66ポンド(約30kg)のボディは、彼の体重を支え、歪んだり、致命的な電流の急上昇を起こしたりすることはなかった。膝が故障するほどの負荷がかかったはずがない。電流の急上昇はランダムに発生しているようだ。
まず、人命を救う。そして、週末を家事から解放してくれる。RoMeLaチームはデータを記録し、次の段階へと進む。この先、数ヶ月、あるいは数年にわたるトラブルシューティングが必要になるだろう。解決策の中には、目の前のタスクに特化したものもあるだろう。しかし、人間の世界で機能するロボットという、より大規模なプロジェクトに応用できるものもある。「ハイリスク・ハイリターンのプロジェクトの好例はヒューマノイドです」とホン氏は言う。「消火活動ができるなら、家の床をモップがけしたり、料理を作ったり、物を運んだりするのにも使えます。だからこそ、私はヒューマノイドをロボット界のスイスアーミーナイフと呼んでいるんです。成功すれば、ほとんどあらゆる用途に使えるようになるんです。」
THOR、SAFFiR、そしてその他のヒューマノイドプロトタイプが実現する長期的な展望は、まさにこれです。これらのロボットは、限定的で数百万ドル規模のシステムの初期世代へと繋がり、複雑なコンポーネントの実地テストを経て量産体制に入ると、あらゆるものがより安価になるでしょう。軍事・医療ミッション用のロボットは、高齢者や障害者の介助、庭の雑草取り、洗濯などを行う一般向けモデルへの道を切り開くでしょう。まずは人命を救うロボット、そして後には週末の雑用から解放されるロボットとなるでしょう。
RoMeLaのエンジニアリングの最初の公開試験は、今年11月に実施される予定だ。SAFFiRは、現在アラバマ州モービルに停泊中の、第二次世界大戦時代の退役艦USSシャドウェルに乗艦する予定だ。ホースで水を噴射したり、キャニスターを投げ込んだりすることはおそらくなく、むしろ船上で歩き回り、いわゆる「船酔い」を治すことになるだろう。1か月後には、THORが最初の任務を遂行する。その後も、海軍のパレット火災やDRCの模擬災害など、他の試験が2014年に予定されている。
DARPAロボティクス・チャレンジの結果がどうであれ、たとえ最高の性能を持つ手足、姿勢、そして制御方式を組み合わせたハイブリッドロボットが誕生する兆しがあったとしても、真の問題は、ロボットが実際に活動し、意義ある展開を果たせるようになるかどうかではない。DARPAのグランドチャレンジとアーバンチャレンジがロボットカーの開発を加速させ、最終的にGoogleの自動運転プリウスの誕生につながったように、ロボティクス・チャレンジは真に有能なロボットの開発を牽引するだろう。このコンテストの後には、ロボットがいつ、どのように社会に登場していくかが問題となるだろう。
ロボットが病院に現れ、患者のベッドへの出入りを手伝ったり、厳冬の建設現場でロボットだけの夜勤をこなしたりするようになるまでには、10年か20年かかるかもしれない。しかし、その前に、人間のような機械が大惨事へと突き進む姿を目にするかもしれない。もしかしたら、スマートフォンの手ぶれした映像に映るかもしれない。あるいは、煙の中から迫り来るロボットの姿を、実際に目にするかもしれない。その手が、あなたの手に届くように伸びてくるかもしれない。
エリック・ソフゲは、2012年11月号の『ポピュラーサイエンス』誌に、将来の宇宙服技術について寄稿しました。この記事は同誌2月号に掲載されました。
